咨詢電(diàn)話
13924666952
400-158-1606


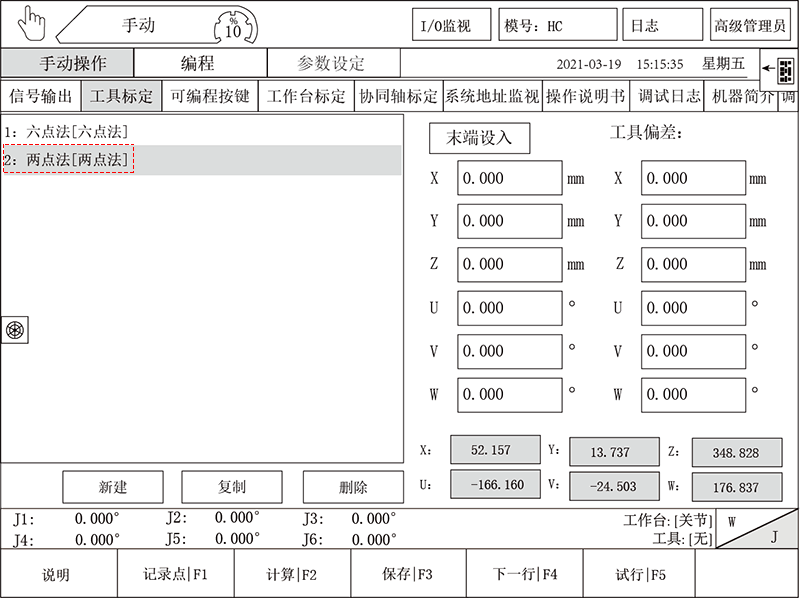
工業機器人控制系統是華成工控的六軸機器人驅控一體(tǐ)系統,工具坐(zuò)标的标定有兩點法、三點法、二十點法、二十三點法、五十點法、多(duō)點法。下面介紹兩點法的坐(zuò)标标定方法:
首先,工具名稱選擇“兩點法”,兩點法标定需要知道工具個個方向的偏差(偏差是指工具尖端點在法蘭盤坐(zuò)标系下的坐(zuò)标值),然後填入偏差數據,用(yòng)戶在已知工具的偏差的情況下才可(kě)使用(yòng)兩點法。
使用(yòng)方法:
第一步,機械手在原點的情況下點擊“末端設入”按鈕設入機械手末端的坐(zuò)标值。
第二步,手動輸入各軸的工具偏差值。
第三步,設置完成點擊确定修改按鈕。
在教導程序的時候,需要将坐(zuò)标系切換為(wèi)工具坐(zuò)标系,然後在程序裏面插入工具坐(zuò)标系。
其他(tā)标定工具的操作(zuò),點擊《工業機器人控制系統手動操作(zuò)工具标定介紹》

