咨詢電(diàn)話
13924666952
400-158-1606


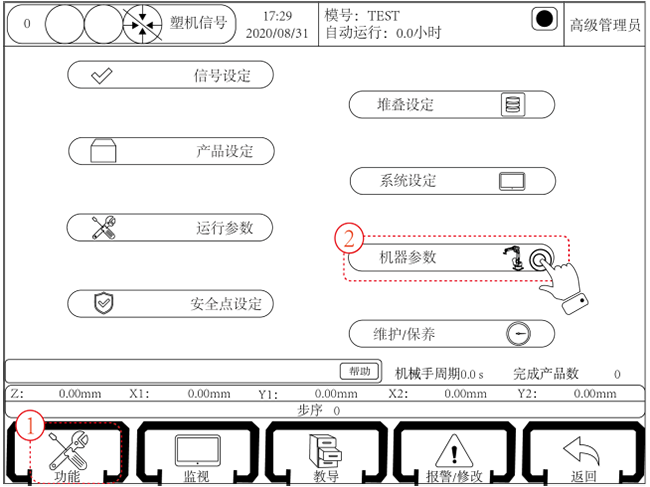
注塑機械手的限位定義是針對機械參數結構的設置,系統為(wèi)華成工控系列注塑驅控一體(tǐ)控制系統,限位定義主要為(wèi)氣動軸的使用(yòng),對伺服軸無用(yòng)。手控器(示教器)切換停止狀态,選擇功能(néng)——進入機器參數如下圖:
限位定義分(fēn)為(wèi)單/雙臂選擇和限位開關信号選擇,如下圖:
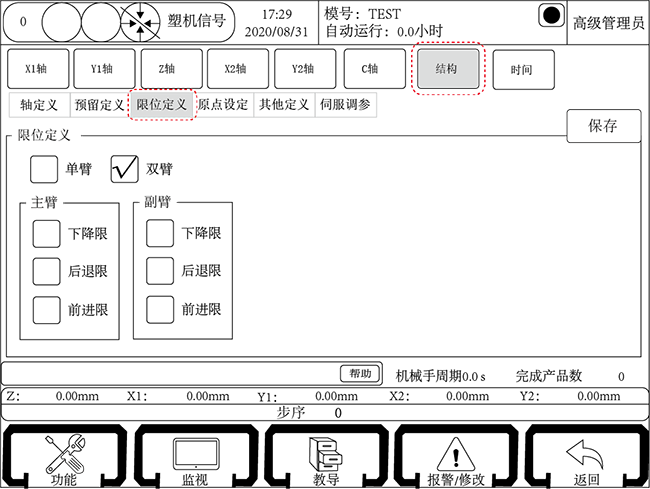
勾選單臂:在手動狀态,隻能(néng)對主臂動作(zuò)進行教導,且按鍵“X2+”,“X2-”,“Y2+”,“Y2-”為(wèi)無效狀态。
勾選雙臂:在手動狀态,主臂和副臂動作(zuò)均可(kě)進行教導,副臂按鍵為(wèi)有效狀态。
主臂:下降限,後退限,前進限。
副臂:下降限,後退限,前進限。若副臂為(wèi)氣動軸,則限位有效,當相應的氣動軸動作(zuò)時,必須有限位信号,程序才會執行下一步。否則報警。
注意:限位定義隻對氣動軸有效,對伺服軸無效。

